Abstract
Reinforcement learning (RL)-based biomechanical simulations have the potential to revolutionise HCI research and interaction design, but currently lack usability and interpretability. Using the Human Action Cycle as a design lens, we identify key limitations of biomechanical RL frameworks and develop MyoInteract, a novel framework for fast prototyping of biomechanical HCI tasks. MyoInteract allows designers to setup tasks, user models, and training parameters from an easy-to-use GUI within minutes. It trains and evaluates muscle-actuated simulated users within minutes, reducing training times by up to 98%. A workshop study with 12 interaction designers revealed that MyoInteract allowed novices in biomechanical RL to successfully setup, train, and assess goal-directed user movements within a single session. By transforming biomechanical RL from a days-long expert task into an accessible hour-long workflow, this work significantly lowers barriers to entry and accelerates iteration cycles in HCI biomechanics research.
Workflow of how MyoInteract can be used to define interactive tasks and train biomechanical agents.
We replace manual file editing with an interactive GUI, significantly reduce training speeds and provide insightful metrics.
We provide breakdowns of the various reward components across training.
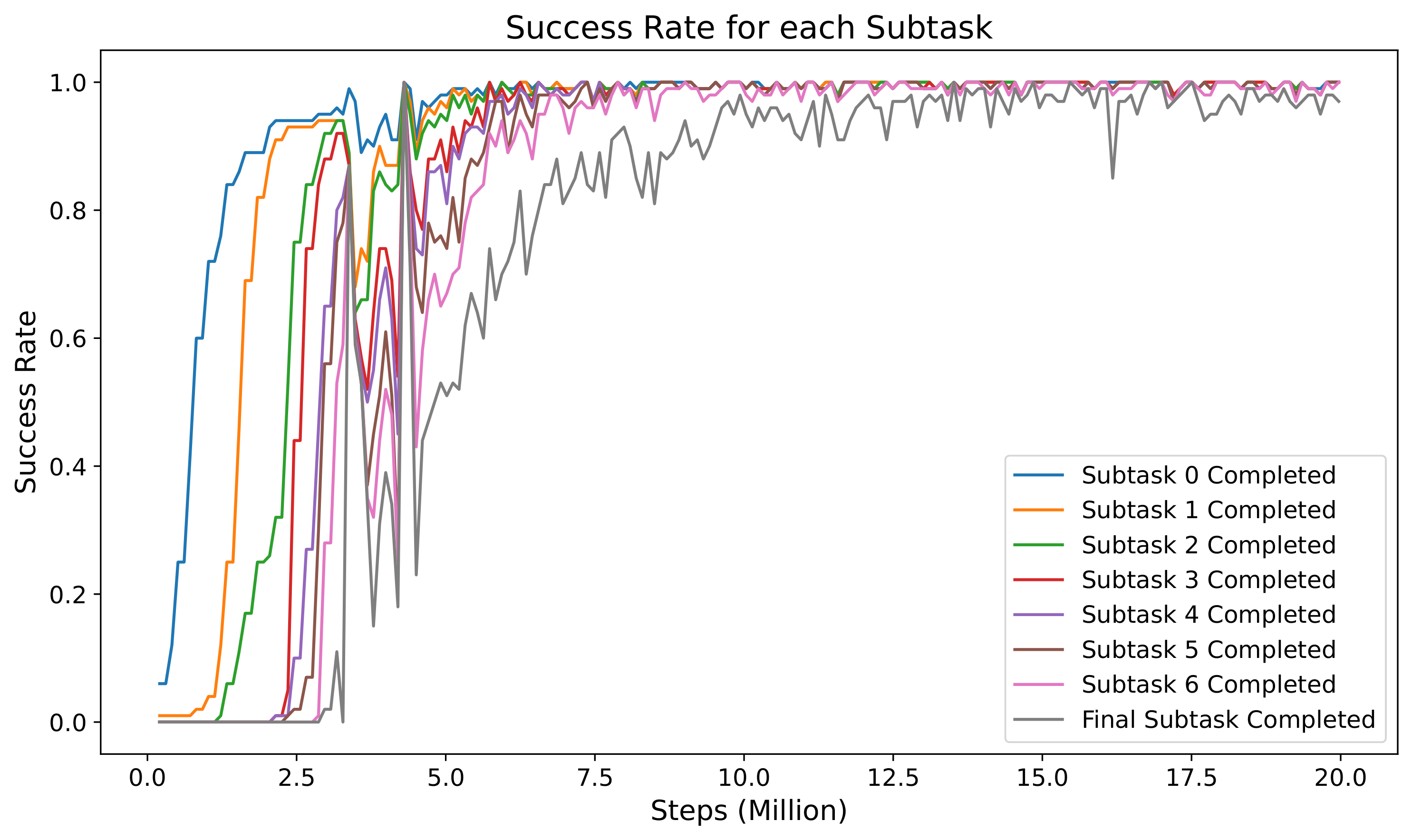
MyoInteract also provides subtask completion metrics for each target.
Trained Policies
BibTeX
@misc{bhattarai2026myointeractframeworkfastprototyping,
title={MyoInteract: A Framework for Fast Prototyping of Biomechanical HCI Tasks using Reinforcement Learning},
author={Ankit Bhattarai and Hannah Selder and Florian Fischer and Arthur Fleig and Per Ola Kristensson},
year={2026},
eprint={2602.15245},
archivePrefix={arXiv},
primaryClass={cs.HC},
url={https://arxiv.org/abs/2602.15245},
}